Apr 2 2020
Actuators that are capable of transforming several environmental stimuli into mechanical works have shown immense potential for designing smart devices like automatic Lab-on-a-Chip systems, soft robots, and micro-electromechanical systems (MEMS).
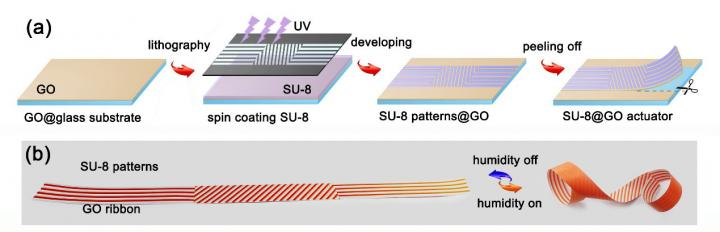 (a) Schematic illustration of the fabrication of patterned SU-8/GO bilayer film using UV lithography. (b) The paper model of patterned SU-8/GO ribbon and its predictable moisture-responsive deformation under humidity actuation. Image Credit: © Science China Press.
(a) Schematic illustration of the fabrication of patterned SU-8/GO bilayer film using UV lithography. (b) The paper model of patterned SU-8/GO ribbon and its predictable moisture-responsive deformation under humidity actuation. Image Credit: © Science China Press.
In general, bilayer structures are extensively utilized for the design and fabrication of stimuli-responsive actuators. Over the last 10 years, there has been more focus on the development of innovative smart materials, to achieve large-scale and fast deformation.
Until now, researchers have successfully developed and used several stimuli response structures/materials for bimorph actuators.
Thanks to their excellent and wide range of physical/chemical properties, graphene oxide (GO) and graphene have turned as the latest type of smart material for actuator design. Scientists have reported the development of several graphene-based bimorph actuators. But these actuators can only do simple deformation, like bending.
As far as it is known, less focus has been devoted to the refined control of their deformation. Although a few earlier studies have reported that it is possible to control the bending direction of the actuators by the patterned constrained layer, the deformation is passively limited by anisotropic mechanical resistance. It is still challenging to develop bimorph actuators that allow programmable and active deformation.
The study was recently published in the National Science Review, a Beijing-based journal, where the researchers from Jilin University and Tsinghua University describe a self-healing graphene actuator swarm that facilitates programmable 3D deformation by combining SU-8 pattern arrays with GO.
In contrast to studies published earlier, the actuator swarm has the ability to achieve programmable and active deformation under moisture actuation.
The SU-8 pattern arrays described in this study can be fabricated into any preferred structures, in which a separate SU-8 pattern can be regarded as an inert layer. Together with the bottom GO layer, each of the SU-8 structures can act as a separate bimorph actuator and actively deform under-stimulation.
Thus, the SU-8/GO bilayer arrays can be regarded as a swarm of actuators such as (actuator-1, actuator-2, and actuator-n). When they are externally stimulated, each actuator tends to deform separately, and the deformation of the whole structure is the combined coordination and coupling of the actuator swarm.
As a result, highly complex deformations can be achieved by controlling the orientation, shape, and size of the SU-8 patterns. The study suggested a completely new method to program the deformation of bilayer actuators, thereby extending the potentials of current bimorph actuators for applications in several smart devices.
This study was financially supported by the National Key Research and Development Program of China (2017YFB1104300) and National Natural Science Foundation of China (61590930, 61522503, 61775078, and 61605055).