Thanks to the tactility in the hands and feet, picking up objects and taking steady steps are possible. As such, the skin serves as a channel that links the outer world or stimuli with the human body.
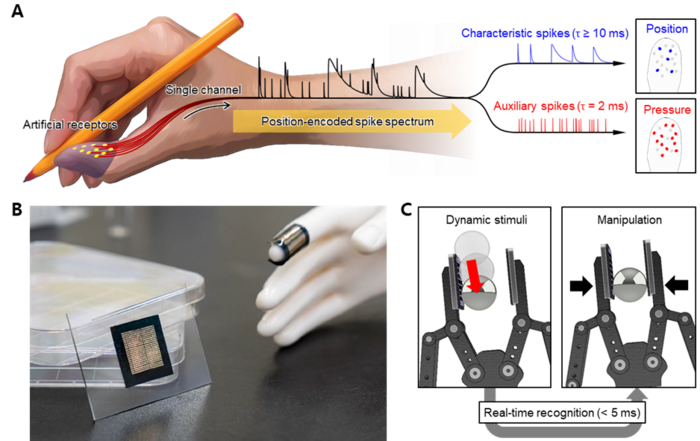 (a) Scheme of the artificial receptors generating the position-encoded spike spectrum, which contains the position information, based on the spike signal generation in the human somatosensory system, (b) The newly developed e-skin and wearing it on the finger, c) A robotic arm equipped with e-skin instantaneously detects and grasps a spherical metal ball. (Image Credit: POSTECH).
(a) Scheme of the artificial receptors generating the position-encoded spike spectrum, which contains the position information, based on the spike signal generation in the human somatosensory system, (b) The newly developed e-skin and wearing it on the finger, c) A robotic arm equipped with e-skin instantaneously detects and grasps a spherical metal ball. (Image Credit: POSTECH).
When these sensory operations do not function properly, it becomes hard to clutch or use objects, or in worse circumstances, fail to guard oneself against hazardous external stimuli such as heat that can result in burns. Hence, it is vital for electric skin – being created for artificial skin or humanoid robots – to be capable of instantly reacting to the external world.
A Pohang University of Science and Technology (POSTECH) study group directed by Professor Unyong Jeong and Ph.D. candidate Taeyeong Kim (Department of Materials Science and Engineering) in partnership with Professor Sung-Phil Kim and Ph.D. candidate Jaehun Kim (Department of Biomedical Engineering) at Ulsan National Institute of Science and Technology (UNIST) has created an electronic skin that can sense tactility in the same way as humans do.
Conventional electronic skins were only able to process tactile information by sequential measurement of electric signals emanating from the massive number of pixels configured in the sensor. Therefore, tightly packed pixels took a long time to measure, rendering it hard to develop an electronic skin with a high spatial resolution that reacts instantly to stimuli.
The sensory receptors of the skin produce a spike signal spectrum in the form of electric potential in reaction to an outer stimulus and recognize it by examining the signal pattern in the brain.
The scientists took a clue from this signal production and recognition mechanism of the skin’s sensory system to create a synthetic sensory receptor that creates spike signals on its own and developed an electronic skin that can transmit all signals concurrently to be examined in real-time.
Since a biosignal does not possess information on location, it is hard to recognize a dynamic outer stimulus in high spatial definition. To surpass this limitation, the scientists presented for the first time that the artificial spike signals can be tweaked to contain the position information.
Fitted with this functionality, the e-skin can examine spatial information such as position and motion trace, and temporal information such as dynamic contact area and speed. Since all synthetic receptors in an e-skin convey signals with only a single pair of measuring electrodes, the electrode structure has been streamlined compared to conventional e-skins.
Applying this technology to a real robot, the scientists verified that the synthetic skin reacts to external stimuli in the same way that humans do.
Our body steadily generates electric signals thanks to the flexible nature of electrolytes. Understanding the biosensory mechanisms and developing methods to actualize them with electrolyte materials, we anticipate the e-skin to be applicable to recover tactility in damaged skin in patients and make robots with the ability to emotionally connect with humans.
Unyong Jeong, Study Co-Corresponding Author and Professor, POSTECH
Professor Sung-Phil Kim of UNIST, the other co-corresponding author of the study, stated, “Converting the external stimuli into spike signals and processing them is a groundbreaking idea that mimics how the human nervous system processes information.”
If a new AI model is developed using this spike information encoding method, robot tactile intelligence can be further developed and effectively applied to next-generation semiconductor technologies such as neuromorphic chips.
Sung-Phil Kim, Study Co-Corresponding Author and Professor, UNIST
The study was published in the international journal Science Robotics and was performed with support from the Basic Research Laboratory Program and the Brain Convergence Research Program through the National Research Foundation of Korea.
Journal Reference:
Kim, T., et al. (2022) Dynamic tactility by position-encoded spike spectrum. Science Robotics. doi.org/10.1126/scirobotics.abl5761.